# Long Short Term Memory
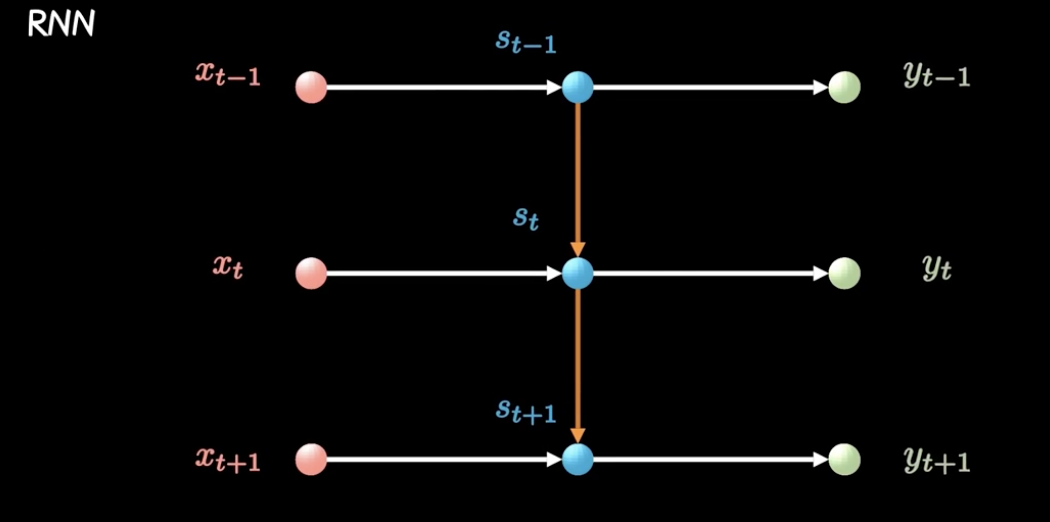
# Simple RNN
无隐藏层的循环神经网络,每个时刻的决策都依赖上一个时刻的决策结果。
但是,新的知识不是直接加上上一时刻的知识,而是加上一个通过隐藏层后更加模糊宏观的知识,将这个定义为神经网络中的隐节点,也就是说,潜意识里直接利用的是一段记忆融合后的东西,而不单单是上一时间点的输出,这种加入隐藏层的RNN就是经典的RNN,如下图所示
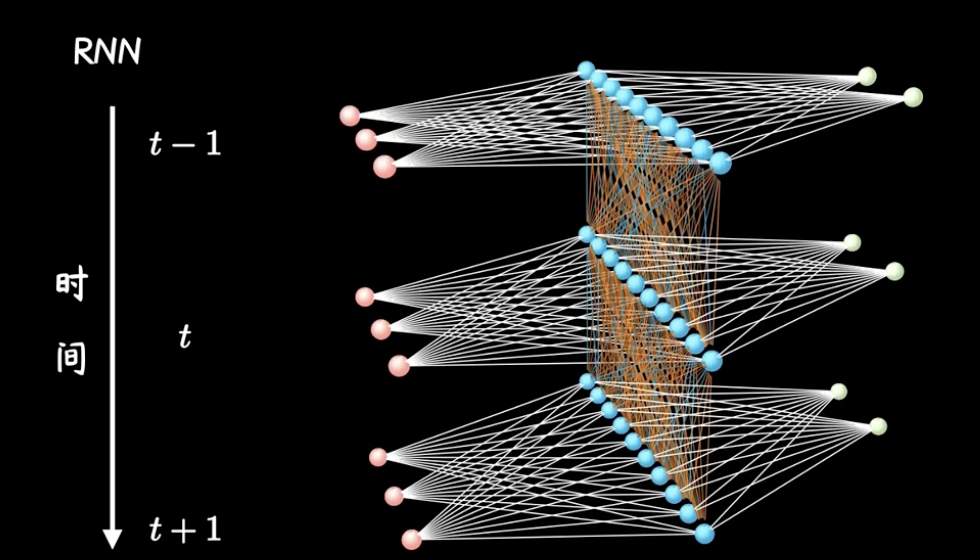
但是,存在隐藏层的RNN,由于误差反向传播,梯度会容易发生指数级别的衰减或者放大
因此RNN的记忆单元是短时的
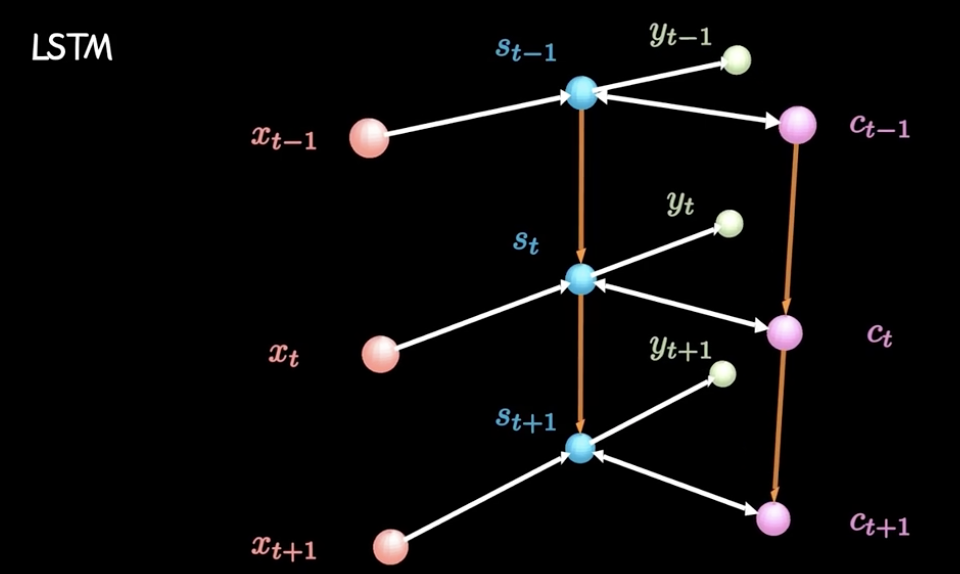
# LSTM—长短期记忆
# 整体架构
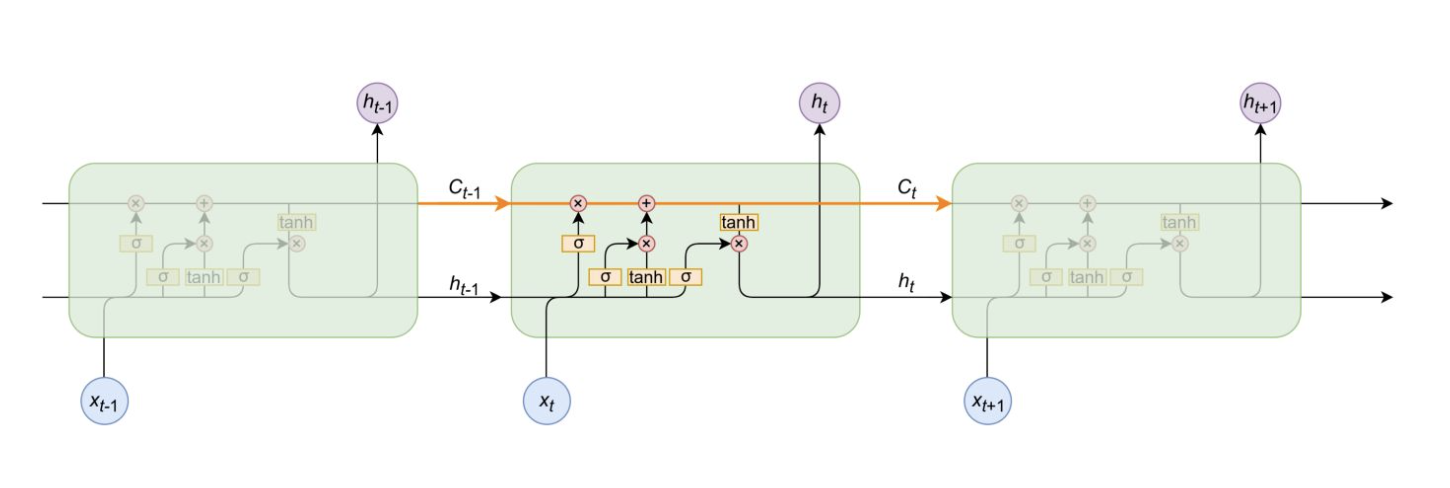
实际上是在RNN的基础上加了一个“日记本”,即长期记忆
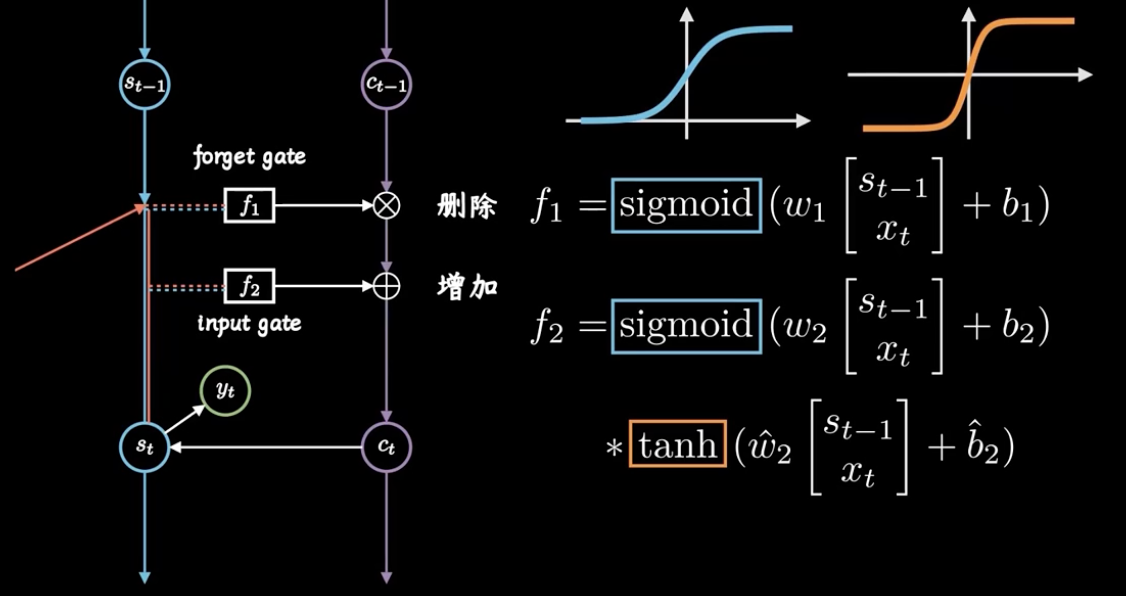
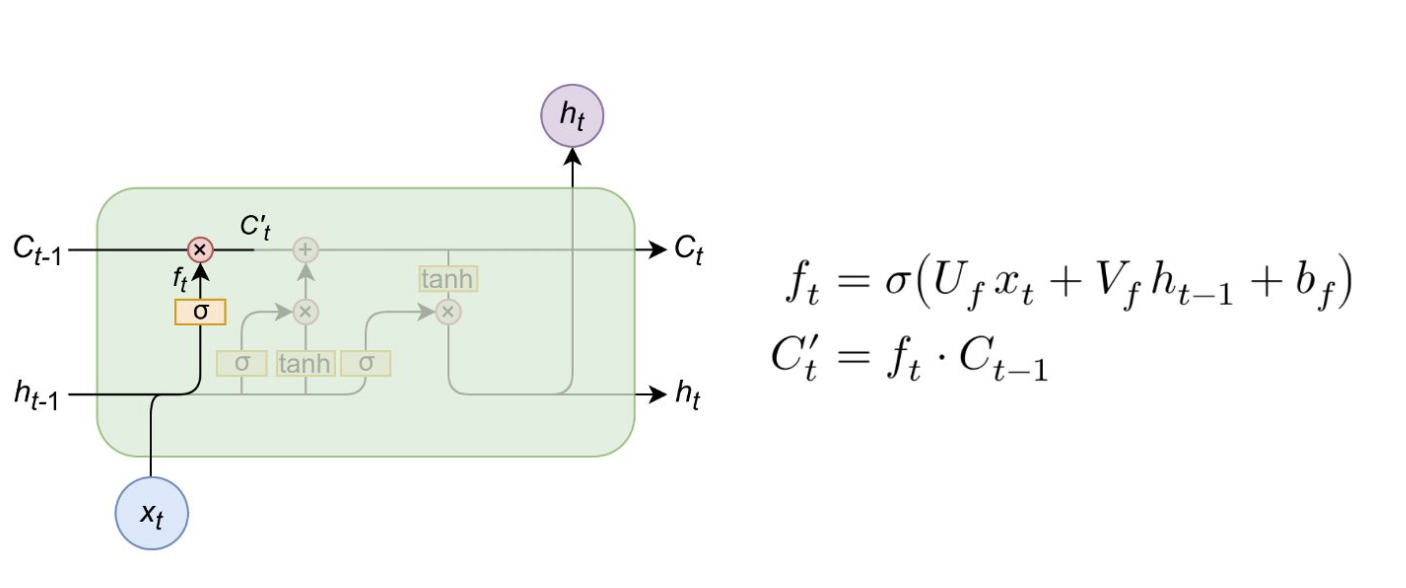
# 遗忘门
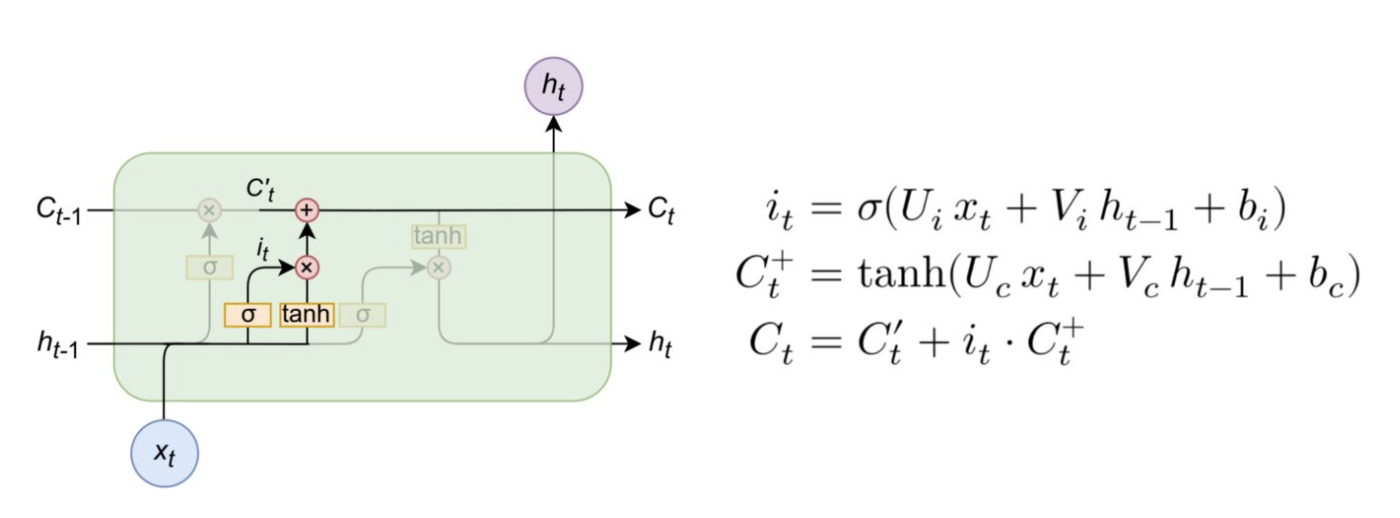
# 输入门
# 输出门
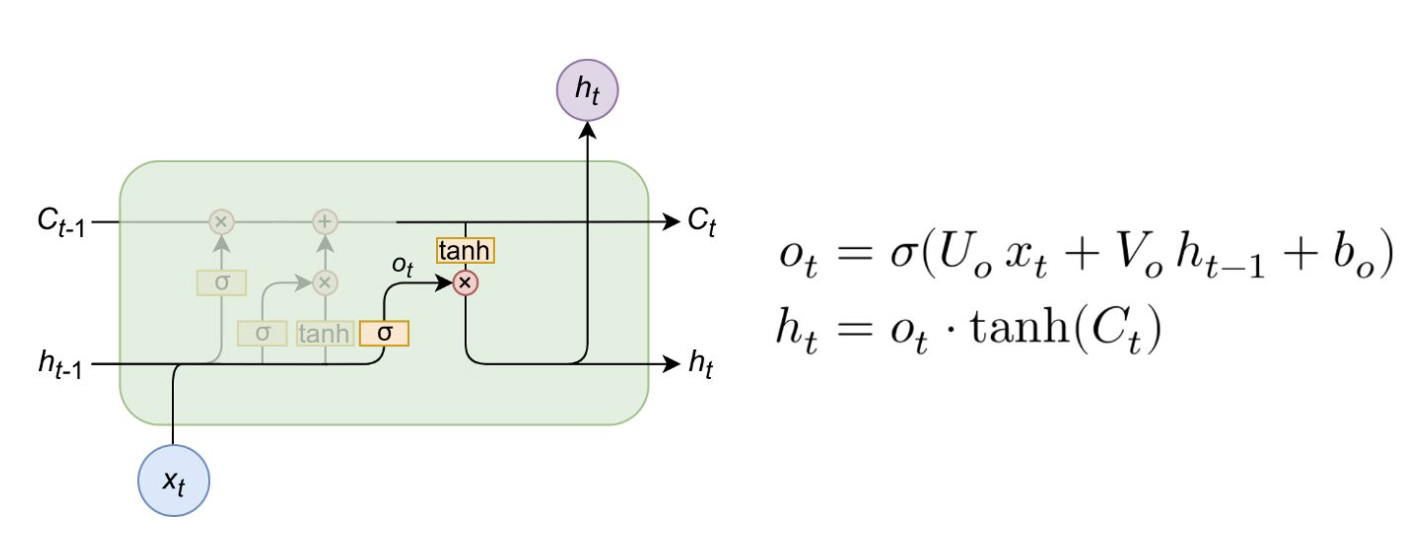
# 公式
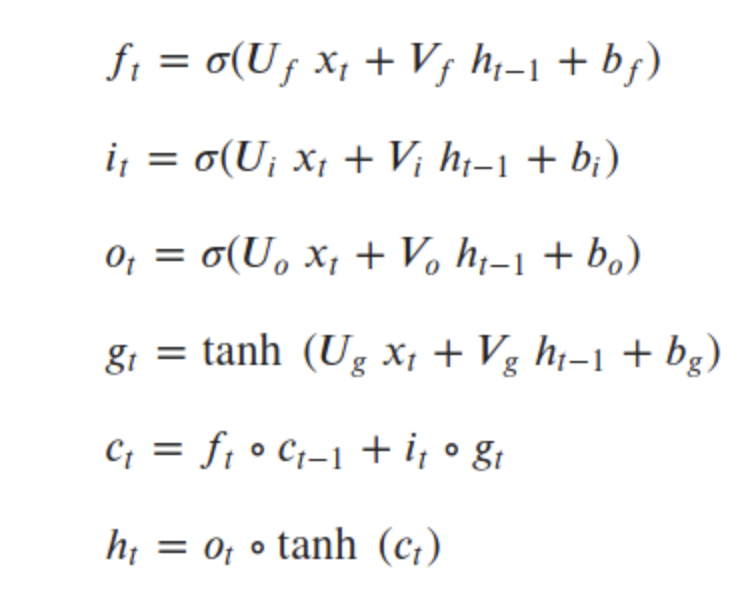
# 代码
class LSTM(nn.Module):
def __init__(self, input_size, hidden_size):
super(LSTM, self).__init__()
self.input_size = input_size
self.hidden_size = hidden_size
# 输入门
self.U_i = nn.Linear(self.input_size, self.hidden_size)
self.V_i = nn.Linear(self.hidden_size, self.hidden_size)
# 遗忘门
self.U_f = nn.Linear(self.input_size, self.hidden_size)
self.V_f = nn.Linear(self.hidden_size, self.hidden_size)
# 长期记忆
self.U_c = nn.Linear(self.input_size, self.hidden_size)
self.V_c = nn.Linear(self.hidden_size, self.hidden_size)
# 输出门
self.U_o = nn.Linear(self.input_size, self.hidden_size)
self.V_o = nn.Linear(self.hidden_size, self.hidden_size)
def forward(self, x, init_states=None):
batch_size, seq_len, n_dim = x.size()
hidden_state = []
if init_states is None:
h_t, c_t = (
torch.zeros(batch_size, self.hidden_size),
torch.zeros(batch_size, self.hidden_size)
)
else:
h_t, c_t = init_states
for t in range(seq_len):
x_t = x[:, t, :] # 每时刻输入为当前的单词
i_t = torch.sigmoid(self.U_i(x_t) + self.V_i(h_t))
f_t = torch.sigmoid(self.U_f(x_t) + self.V_f(h_t))
g_t = torch.tanh(self.U_c(x_t) + self.V_c(h_t))
o_t = torch.sigmoid(self.U_o(x_t) + self.V_o(h_t))
c_t = f_t * c_t + i_t * g_t
h_t = o_t * torch.tanh(c_t)
hidden_state.append(h_t.unsqueeze(0))
hidden_state = torch.cat(hidden_state, dim=0)
hidden_state = hidden_state.transpose(0, 1).contiguous()
return hidden_state, (h_t, c_t)
# 注意
- LSTM按时间维度展开,实际上是3维模型
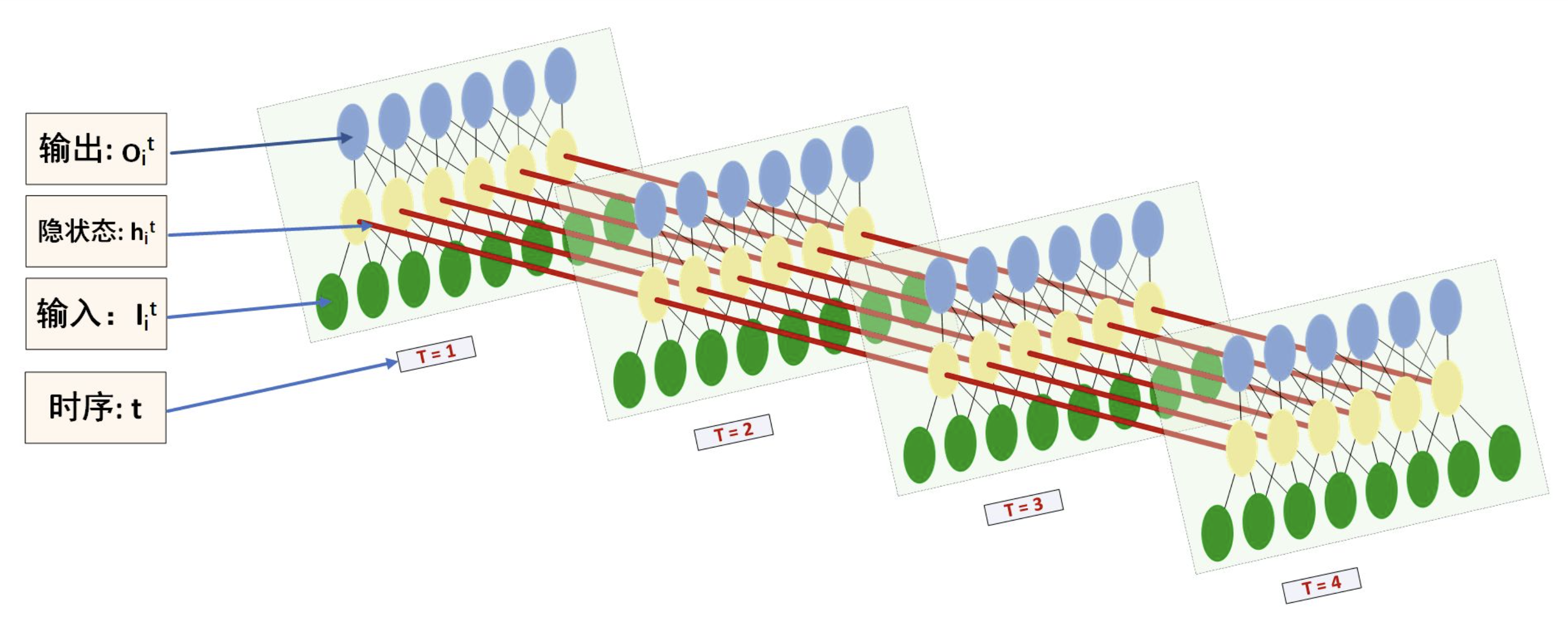
每个时间步,输入为当时的单个字符(从代码可以看出),之前的信息都在长期记忆中
上图为1个LSTMCell,只是把时间步展开了
整个计算过程如下图